














Umbau der Montierung
Vollständiger Umbau einer LX 200 Gabelmontierung
Der Weg zum hochgenauen Encoderbetrieb

Bild der zerlegten Mechanik der LX200 Montierung.
Nach etwa 20 Jahren treuen Dienst gab es im Jahr 2012 den technischen „Supergau“ in der 16″ LX200 Gabelmontierung meines Teleskops, vor dem sich wohl jeder Hobby-Astronom fürchtet; die Elektronik verweigerte mir erstmals vollständig den Dienst. Hatte es in der Vergangenheit immer Ideen gegeben, diverse Reparaturen und Verbesserungen selbst auszuführen, so musste ich jetzt erstmals passen. Der große Schaden in der Haupt Elektronik und schwierig zu beschaffende, veraltete oder abgekündigte Bauelemente für die Reparatur machten die Montierung nahezu irreparabel.
Die von Meade angebotene, sehr kostspielige Austausch- Elektronik ist vom heutigen, technologischen Stand und Anspruch in der Amateurastronomie vollkommen uninteressant; daher war der Umbau der einzig richtige Schritt…
Download: Umbaubericht in der Interstellarum Heft 95/2014.
Nach einigen, kleinen Reparatur-Fehlschlägen und Wochen intensiver Überlegungen mit kleineren Tests stand mein technologisch vollkommen neues Gesamtkonzept für die Steuerungs-Elektronik und Mechanik fest. Die Gabelmontierung sollte im Kern nur das mechanische Gehäuse behalten, jedoch mit den neuen Änderungen in max. möglicher Genauigkeit im Remote-Betrieb den zukünftigen Dienst verrichten.
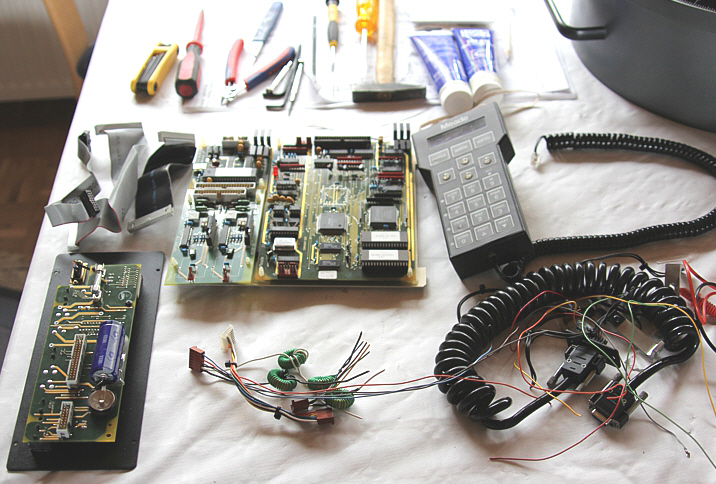
Alte Elekronik der LX200 Steuerung hatte ihren Dienst getan…
Zunächst konnte mit dem Einbau neuer Kegelrollenlager die bewegliche Mechanik (inkl. Field-Rotator mit dem Getriebe) in der Basisausstattung verbleiben, den Rest der mechanischen, beweglichen und elektronischen Steuerungskomponenten habe ich vollständig ersetzt, verbessert und netzwerktechnisch beträchtlich ausgebaut.
Die grundsätzliche Entscheidung fiel dabei auf eine Sitech Servo II von Sidereal Technology, der Entwickler Dan Gray hat sie bereits mit je zwei leistungsfähigen Kanälen für Servomotoren und hochauflösende Achs-Encoder ausgestattet.

SiTech Servo II Steuerung mit Handccontroller (Eigenbau)
Der USB Anschluß dieser Steuerung ist -wie die anderen USB Geräte- direkt am internen USB Server (Silex) und über den internen GBit-Router mit meinem Heimnetzwerk (Lan+WLan) verbunden. Die Ansteuerung der Hardware (Teleskop, Kameras, Kuppelsteuerung, u.A.) kann dadurch über die kompatiblen Treiber auf einem beliebig wählbaren Steuerrechner (PC oder Tablet) in meiner Netzwerkumgebung erfolgen. Der Handcontroller wird nur noch für die wichtigsten Grundfunktionen und für Justagezwecke am Teleskop benutzt. Nach dem umfangreichem Umbau erfolgte noch einige Wochen an Test- und Anpassungszeit für die richtige Einstellung des Setups und der Encoder…
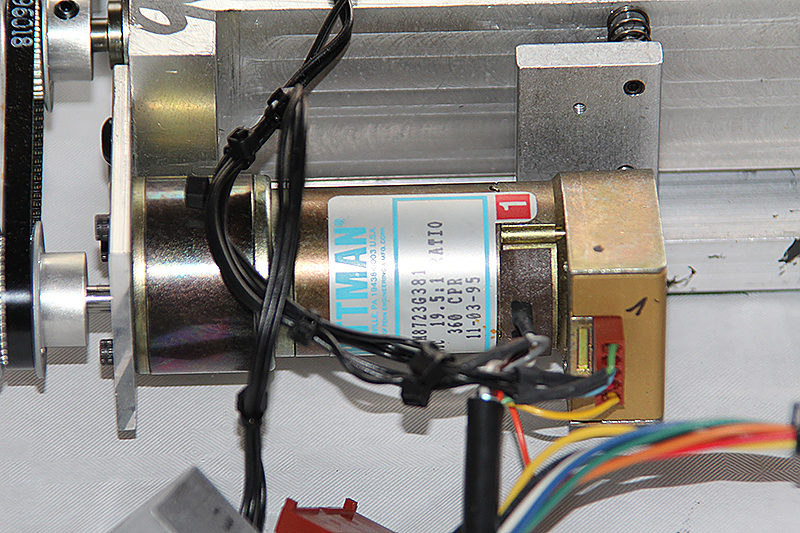
Motoren (im Bild Pittman Motor). Sind inzwischen Faulhaber 3557 mit Planetengetriebe, Untersetzung 14:1, 500 CPR Encoder auf der Schneckenwelle.
Neben dem kleinen Eigenbau-Handcontroller als einfaches Benutzerinterface ist die Steuerung jetzt vollständig im Netzwerk über den remotefähigen Router eingebunden. Da genug Platz vorhanden ist, befindet sich die Steuerung mit Router, Switch, Netzteilen und Anschlüssen im Gehäuse der Gabelmontierung. Das Konzept gewährleistet mir maximale Performance für die Benutzerschnittstellen im Gbit Netzwerk und freien Zugriff unterschiedlichster Rechner für verteilte Aufgaben. Damit es keinen „Kabelsalat“ durch die Rotation der Hauptmontierungsachse (RA) gibt, sind die Basisanschlüsse und Verkabelungen (Power-/Netzwerk-/Datenleitungen) über Kontakt-Schleifringe durch die RA-Achse geführt und in der Gabel auf seitlichen Anschlussfeldern für GigE, USB 3.0 und schaltbare +12V Versorgung verteilt.
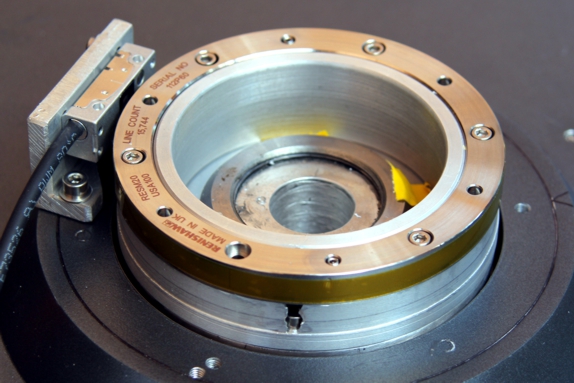
Renishaw Encoder auf der RA Achse. In der Mitte der Spannring für die Kegelrollenlager und die Durchlassbohrung für die Schleifring-Leitungen.
Mechanisch wurden die Lagerschalen für die Aufnahme der Kegelrollenlager passgenau ausgedreht und anschließend auf den Achsen spielfrei verspannt. Die Montierung hat nicht nur enorm an mechanischer Stabilität und Spielfreiheit gewonnen, sondern ist mit integriertem Teleskopserver, der neuen Sitech Servo II Steuerung und den hochauflösenden Renishaw Encodern auf den Rotationsachsen (RA/DEC) zu einem hochpräzisen, professionellen Nachführ- und Goto- Teleskopsystem geworden.
Alle technischen Änderungen im Überblick
- Steuerung der gesamten Montierung (SiTech Servo II) und Elektronik-Anbauten über 10GBit LAN (Standard), 1200MBit WLAN (2,4 u. 5 Ghz) , DSL/VDSL (VPN), USB 3.0 Server oder Bluetooth
- Achslager DEK; Lagerschale angepasst für hochgenaue Kugellager
- Achslager RA; Lagerschale ausgedreht und vorgespannte für spielfreie Kegelrollenlager (150 mm)
- Mechanische Tragfähigkeit der Montierung (nur Instrumente) ca. 100 kg
- RA Achse mit 12 Zoll Durchmesser, 350 Zähne, Aluminium Schneckengetriebe
- DEK Achse mit 12 Zoll Durchmesser, 350 Zähne, Aluminium Schneckengetriebe
- Faulhaber Servomotoren RA/DEK mit 500 CPR (2000 in Quadratur)
- Motor-Untersetzungen Planetengetriebe RA/DEK 14:1, 350:1 auf dem Schneckenrad
- Hochauflösende Renishaw Encoder in die RA- und DEK- Achse mit 15,7 Mio. Ticks/Umdrehung oder 0,081 Bogensekunden je Tick
- Mechanischer Rundlauf der Encoder-Ringe <= 1/100 mm
- Positioniergeschwindigkeit (Slew) 5°/Sek. im Normalbetrieb (bis max. 8°/Sek. einstellbar)
- Encoderbetrieb mit Parkpositions-Sensoren in RA und DEK
- Benutzerinterface mit einfachem Handcontoller und ASCOM-kompatibler Steuerungs-Software für PC
- Teleskop Modellierung mit Pointingmodell (PointXP) vollständig in der Software integriert
- Pointing (abhängig von der Belastung der Montierung) min. < 12“ RMS
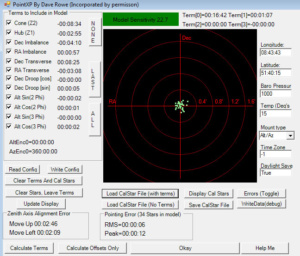
Positionierungtests mit Pointing Modell
mit Pointing-Modell
- Nachführgenauigkeit < 0,5“ RMS in 5 Minuten
- Durch die gute „PID“ Regelung ist kein besonderes Ausbalancieren der Achsen erforderlich
- Leitungsversorgung durch die RA-Achse über rotierende Schleifringe (Power-/Netzwerk-/Datenleitungen). Das RA-Achsgehäuse wurde dazu durchbohrt
- Spannungsanschluß der Montierung 110/220V, Integrierter Netzfilter, Überspannungsschutz, Kontrollleuchte und Netzschalter
Externe/Interne Anschlüsse
- Guider Anschluß und 2x Ethernet (Gbit) Anschluss auf der Frontblende der Gehäuse-Basis
- 8 x USB, 4 x 10GigE für Kameras und 4 x 1Gbit Ethernet Ports (Zusätzlich ist eine USB Festplatte einbaubar)
- stromsparender WLan Switch/Router (1200 Mbit/s) und 4x 1GBit Port
- stromsparender GBit- USB Server für alle USB Geräte
- stromsparender GBit Switch mit 8 Ports
- Bluetooth Interface (Extern ansteckbar)
- Zeitsynchronisiert über GPS Time (≤ 5ms)
- Hutschienen-Netzteile 24V /5A, 12V /10A (Netzteile Wirkungsgrad > 90%, geringe Wärmeentwicklung) sowie Wandler für 48V/1A + 5V/1A
- Remote Ferneinschaltungen der gesamten Montierungselektronik mit dem GPS Zeitserver und der Eigenbau-Kuppelsteuerung
HINWEIS:
Alle wichtigen Anschlüsse sind in und an der Gabel untergebracht. Es gibt im Betrieb durch Kontakt-Schleifringe in der Hauptrotationsachse (RA) für Netzwerk- und Poweranschlüsse freie Beweglichkeit ohne den oft üblichen „Kabelsalat“!
Weitere Ergänzungen
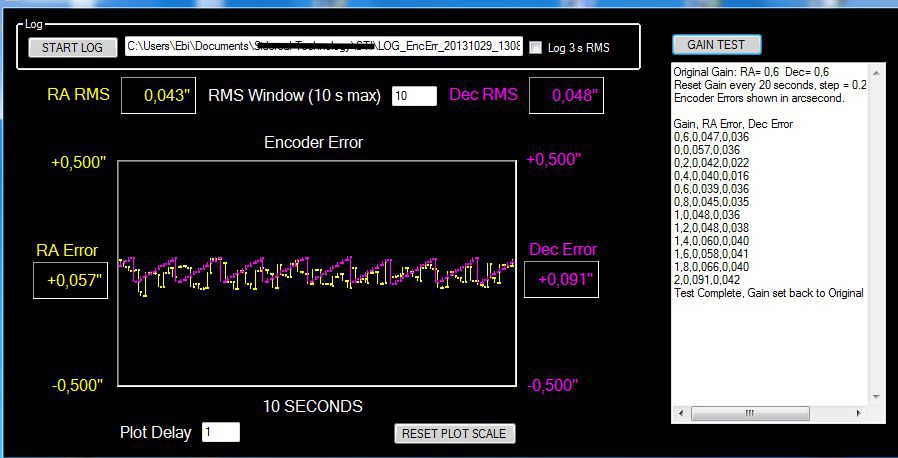
RMS Gaintest
- Field Rotator, Umbau des Meade 1222 für Servoantrieb. Einbinden eines 2. Controllers (Sitech Servo I).
- Neuer Funk-Handcontroller für die Grundfunktionen der Montierung
- Gbit NAS Server für die Kameras (Bild- und Videodaten)
Testergebnisse des Encoderbetriebs:
Nach Einbau der Gabelmontierung in die Sternwarte erfolgte das Feintuning und die ersten Encodertests mit maximalen Setup bei ca. 80kg Zuladung.
-> Beide Achsen (Ra/Dek) mit den Getriebeeinheiten laufen sehr präzise bei Typ. 0,05″ RMS (20 Sec. Messung am Encoder)!
Das Besondere ist, das diese guten Ergebnisse der Messungen auch bei ungünstigen Belastungsverhältnissen (Dysbalance durch Aufbauten) über Stunden vollkommen stabil bleiben.
Das Pointingmodel (PointXP) wurde mit dem Standard-Setup (max. Vergrößerung) bei kleinem Bildausschnitt mit Basler acA640 Kamera und Baader Barlow (2.1x / bei 8540mm Brennweite) als Setup für Planetenaufnahmen erstellt. Das Gesichtfeld ist 1,4 x 1 Bogenminuten bei einer theor. Auflösung der Kamera von 0,14″/Pixel. Die Genauigkeit (Goto und Tracking) kann noch durch mehr Referenzsterne gesteigert werden, 19 Referenzsterne sind aber bisher genau genug. Das Positionieren (Goto) der Montierung liegt dabei immer im Gesichtsfeld der Kamera und entspricht einer vergleichbaren, theoretischen Vergrößerung (Okular) von min. 2500-Fach! Ein wirklich überzeugendes Ergebnis…
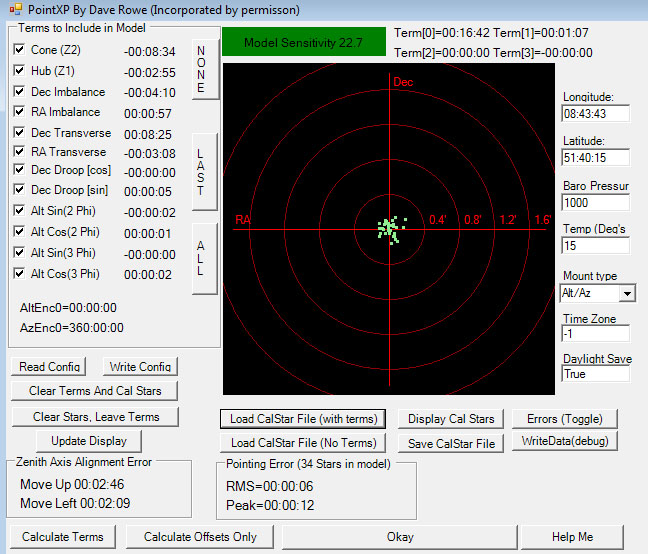
Positionierungtests mit Pointing Modell
Jetzt ist mit dem einstellbaren Pointing Modell eine sehr große Zielgenauigkeit beim Anfahren und Nachführen der Objekte gesichert. Servo-und Encoderbetrieb mit herkömmlichen Schneckengetrieben bilden immer noch einen nicht zu unterschätzenden Vorteil gegenüber dem Direktantrieben mit Torque Motoren. Das selbsthemmenden Getriebe mit seiner hoher Haltekraft bei Lastwechsel oder bei plötzlichem Stromausfall sind gute Beispiele dafür. Sie garantiert ebenfalls über längere Zeiträume höchst exakte Nachführung ohne Guiden und gute Verfolgungsgenauigkeit beim Satelliten-Tracking; so wie es sonst nur bei Direktantrieben möglich ist. Die atmosphärischen Störungseinflüsse (Seeing) im Betrieb sind vergleichsweise deutlich grösser.
Alle mechanischen Fehler, die zwischen Motor- und Achs-Encoder auftreten, werden elektronisch korrigiert. Weitere Einflüsse von Aussen (z.B. Windstöße) werden beim Tracken von Satelliten in Hochgeschwindigkeit zuverlässig kompensiert und stellen damit ein robustes Nachführkonzept dar.
Damit steht diese alte Montierung technisch in gleichwertiger Konkurenz zu den anspruchsvollen und renomierten, kommerziellen Montierungsbauern wie z.B. ASA Austria, Astro Physics oder Planewave.
Videos, erster Montierungstest (Positionierungs- und Encodertest)
Positionierungstest
Wichtiger Hinweis:
Dieser Bericht erhebt natürlich keinen Anspruch auf Vollständigkeit!